
安谋科技发布新一代“玲珑”VPU IP:以“六边形战士”赋能AI视频全场景
近日,国内领先的芯片IP设计与服务提供商安谋科技(Arm China)在上海举办“玲珑·视界”开年技术发布会,正式推出面向AI应用的新一代VPU IP——“玲珑”V560/V760(内部代号“峨眉”)。此次发布不仅是安谋科技自研IP产品线的重要突破,更标志着其以“六边形战士”的全面实力,瞄准AI时代全场景视频处理需求,为产业伙伴提供强大、高效且灵活的“视觉核芯”。

市占率超50%!51Sim领跑中国高阶智驾仿真
51Sim 以 53.5% 的市场份额位居行业第一,成为当前国内市场占有率最高的高阶智驾仿真平台厂商。报告同时指出,伴随高阶智能驾驶逐步迈向规模化量产阶段,仿真平台的角色正在发生变化——其功能已不再局限于研发阶段的效率提升工具,而正演进为支撑智能驾驶规模落地与安全体系构建的关键基础能力。
爱芯元智今日登陆港交所:中国边缘AI芯片第一股诞生,智能汽车赛道加速突围
“上市是爱芯元智发展的关键里程碑,未来我们将以平台型战略纵深布局,加速AI普惠与智能化变革。”
重构汽车电子电气架构,引领行业变革 | 经纬恒润物理区域控制器ZCU技术白皮书正式发布
汽车产业正经历从“硬件定义”到“软件定义”的世纪变革,传统的分布式电子电气架构已成为智能化发展的桎梏,其固有的“算力与成本”、“功能与安全”、“创新与惯性”矛盾,构成了车企转型的“不可能三角”。

dSPACE 智能驾驶SIL/HIL 仿真验证解决方案:技术赋能智能驾驶研发全周期
在智能驾驶技术飞速迭代的今天,如何在加速研发的同时确保系统安全可靠?

《智能网联汽车 组合驾驶辅助系统安全要求》征求意见稿的解析
最近坊间热议L2级辅助驾驶强标准备落地,学名是《智能网联汽车 组合驾驶辅助系统安全要求》征求意见稿,还在征求意见阶段。
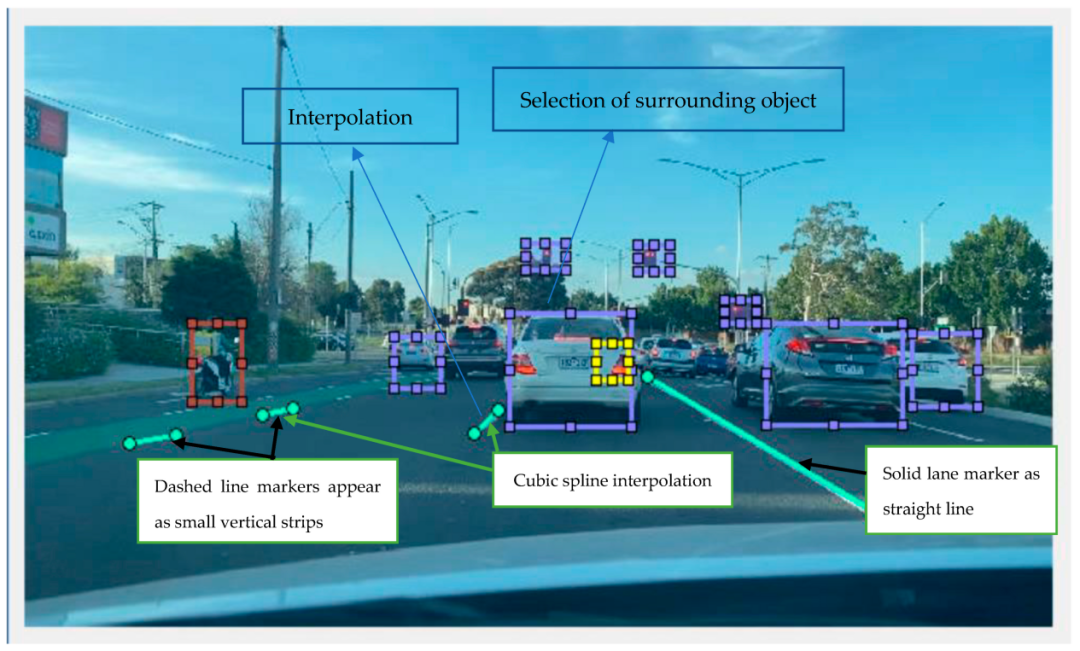
无图时代的NOA也会“瞎”——车道线脑补如何拯救城市领航?
在自动驾驶领域,现实场景存在较高的复杂性。如遮挡情况下,前车、施工锥桶、落叶遮挡车道线(约30%城区场景存在遮挡)。

施工场景为何会成为自动驾驶难点?
施工场景一直是自动驾驶的长尾场景(long tail)的主角之一。长尾的意思是稀少但是重要,长尾的累计权重甚至超过了头部效应。可见这类场景的重要性。
百度智能云四轮驱动,加速VLA智能驾驶量产落地
算力筑基、数据赋能、模型驱动、工具护航
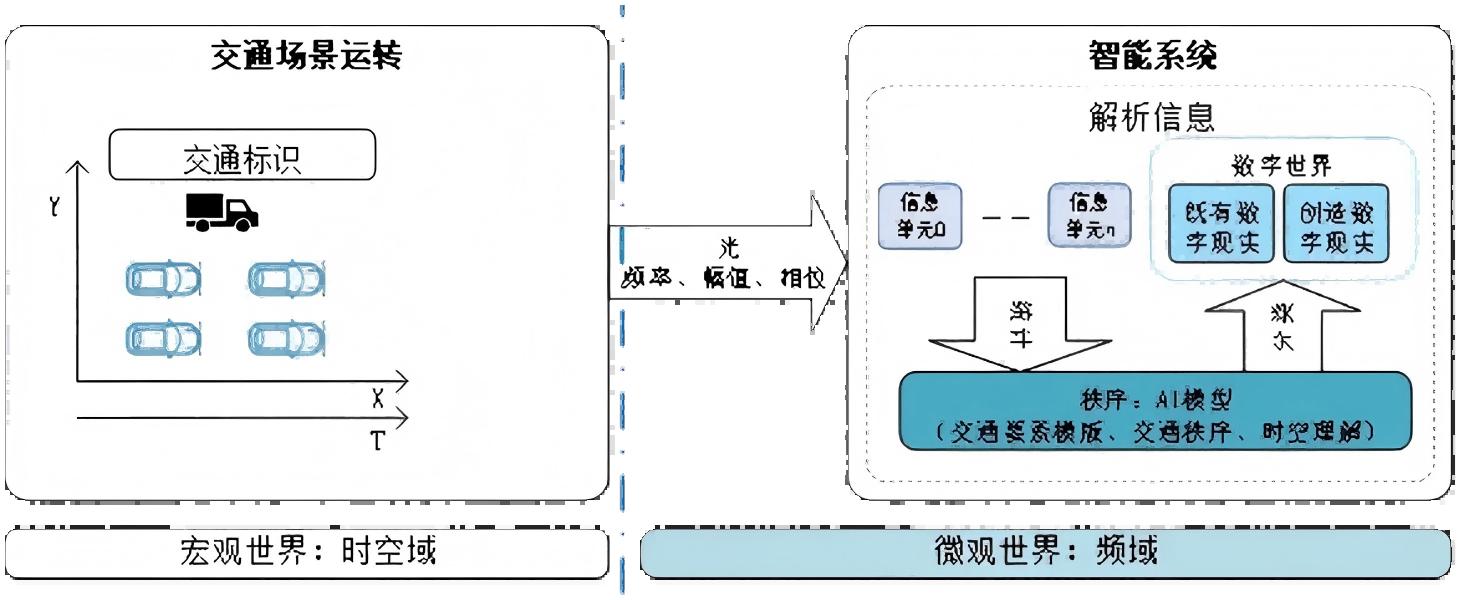
全新视角理解智能驾驶系统运行原理与安全(三)
本文深入分析智能驾驶系统安全问题,这需要放在一个场景里面、一个系统里面统一分析错误、事故和安全。这个世界的物理真相并不透明,主导这个世界运转的规律和这个世界的真实结构隐藏在微观物理世界里面,而微观世界运转方式是频率耦合、秩序适配、统计结果。
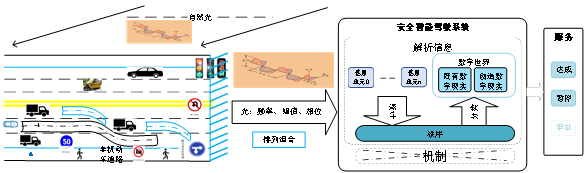
全新视角理解智能驾驶系统运行原理与安全
本研究旨在重构智能驾驶系统理论和架构,彻底解决智能驾驶产业的安全问题,促进产业落地。本文需要和《智能驾驶系统实时校验机制的研究》(已在知网刊出/将在汽车工程期刊2025.7刊出)同步交叉阅读,确保逻辑的连续和完整。本文是对其研究范式、背后的思想、关键概念做解释说明。
一文熟悉如何最大化的利用GPU用于高性能计算领域
大多数还是应用NPU/TPU/BPU这些AI运算核心,加上本身的自带的CPU运算核A72或A52诸如此类,而在渲染这一项任务主流的还是应用在了座舱域控的GPU中实现。

博世辅助驾驶技术破解海外市场准入难题
在5月15日举办的第五届焉知汽车年会智能辅助驾驶论坛上,博世智能驾控事业部高级产品经理古欣分享了面向海外市场的先进辅助驾驶(ADAS)解决方案。
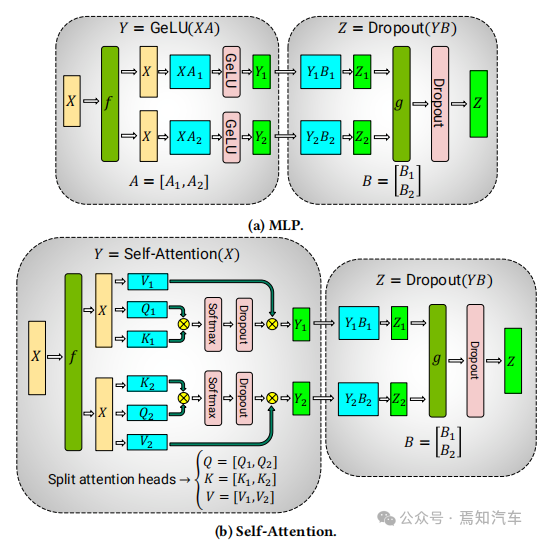
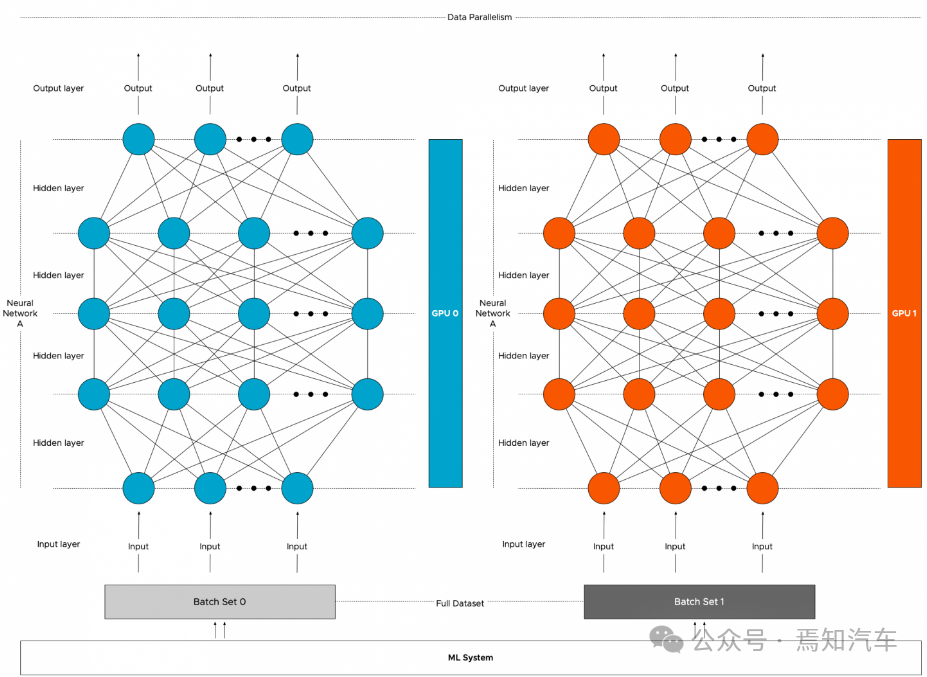
一文揭开AI芯片并行处理技术应用的神秘面纱(一)
GPU 技术作为一种并行技术的主流实现方式。其内部并行技术包括模型并行、张量并行、数据并行、流水线并行。研究好基于GPU的具体并行实现逻辑可以很好的利用其并行算力的产生更好的输出。

RoboSense速腾聚创第100万台激光雷达下线 交付人形机器人“青龙”
2月21日,RoboSense速腾聚创在深圳举办第100万台激光雷达下线仪式,并于2月24日将这台激光雷达正式交付予人形机器人(上海)有限公司(以下简称“人形机器人公司”)。这标志着RoboSense速腾聚创成为全球首家达成百万台高线数激光雷达下线的企业。

